









Loading
技術研究所

多自由度ステージ機構の開発研究(平成16年度研究概要)
顕微鏡や分析機等、バイオ、ナノテクノロジー分野における微細作業ステージには、一般的に3自由度(X-Y-Z)機構が多く利用されています。その理由として、エンドユーザの要求というよりも、多自由度を実現する現状の機構(並進移動機構+回転移動機構)が複雑であり制御が難しく高価であるという装置供給側の問題が考えられます。これはちょうど、工作機械において、3軸(X、Y、Z)加工機が一般的であり、近年多軸加工機が注目され、高能率な行程集約加工が実現されつつある状況を考えると理解しやすいと思われます。
本研究開発では、上記のような状況を考慮し、従来の3自由度(X-Y-Z)ステージ機構と同等以下の大きさ、価格で、多軸微細作業ステージ(X、Y、Z、PTCH、ROLL、YAW)を実現することを目標とし、パラレルメカニズムを用いた小型6自由度ステージのプロトタイプを製作し、デジタルマイクロスコープを用いた観察実験による評価を行い、実用上非常に有望であることを確認しました。
6自由度小型ステージの概要
- 自由度:6自由度(X、Y、Z、+/- 15mm PTCH、ROLL、YAW +/- 15deg)
- 最大速度:20mm/sec以上、繰返し位置決め精度:1μm
- 耐荷重:2Kgf
- 重量:4.5Kgf
- 直動型6自由度パラレルメカニズム
- 今後成果普及が期待される産業分野:マイクロマシン製造装置、描画装置、SEM、走査電子顕微鏡、バイオ関連機器、欠陥検査/修正装置、精密測定機 等の微細作業ステージの小型、低価格、高機能化
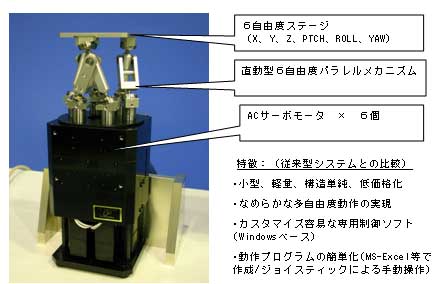
図1 試作した6自由度小型ステージ


