









Loading
技術研究所

三次元設備シミュレーションによる外観視覚検査プログラム品質の事前評価の研究
1.背景および目的
本研究では、ものづくりの品質向上において普及が期待されているものの、構築・運用に課題があるロボットとカメラを利用する外観視覚検査を対象とします。本研究では、外観視覚検査の自動化構築の課題を整理し、課題を解決するロボットとカメラを利用する外観検査向け設備シミュレーションの基本システムやその実装法を提案し、基礎実験によりその有効性を確認します。前身研究で、整理したロボットとカメラを利用する外観視覚検査自動化構築の課題を以下に記します。
- 外観検査構築に際して、現場での作業時間が長期化。全体の作業時間の80%。
- 現場で視覚処置、ロボット動作、検査処理の調整作業が必要。同時並列的、繰り返し調整
- 稼動開始後に検査プログラムの修正・追加頻発
- 検査項目(キズなど)の検査プログラムの修正・追加
- 変種変量生産での新規製品投入による検査プログラムの追加
2.研究概要
本研究では、オフライン(仮想環境)でカメラの焦点距離や撮像タイミングの決定、ロボット動作の生成、および、視覚検査プログラムの事前評価を実施する外観検査向け設備シミュレーションを提案します。提案する設備シミュレーションを利用して、以下の活動の実現を目指します。
- 1製品や設備の三次元CADデータを用いて、CGを利用する仮想空間内でロボットを動作させ、それに同期して仮想カメラが背景画像や照明の濃淡などを考慮して検査点を撮像する。(製品、設備がない状況で検査画像を取得)
- 2撮像した画像を実空間で使う画像処理システムへ自動転送し、製品や設備がない状況で検査プログラムを作成する。(製品、設備がない状況で検査プログラムを作成)
- 3製造用準標準ネットワークミドルウェア(ORiN)を活用して仮想空間と実デバイス(例:PLC)を融合し、実際の撮像タイミングで仮想空間内の検査点を撮像する。(製品、設備がない状況で設備制御プログラムを作成 )
今年度は、特に、上記3の活動を実現する外観検査向け設備シミュレーションを開発します。
3.期待される効果
提案する外観検査向け設備シミュレーションにより、現場での調整時間が短縮化でき、課題解決に寄与でき、産業界での外観視覚検査の自動化の普及に貢献できると考えています。
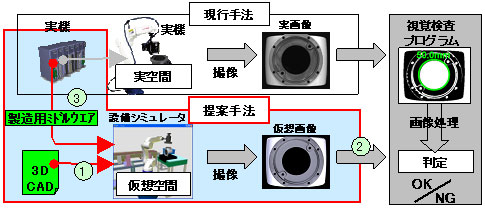
図 提案する外観検査向け設備シミュレーションの概要


